Electronics project
Programming robots for automation engineer apprentices
In combination with professional school, inter-company professional trainings at Swissmechanic and practical jobs at aerosol machines for customers around the world, automation engineer apprentices at Pamasol also work on projects which focus on a certain topic.
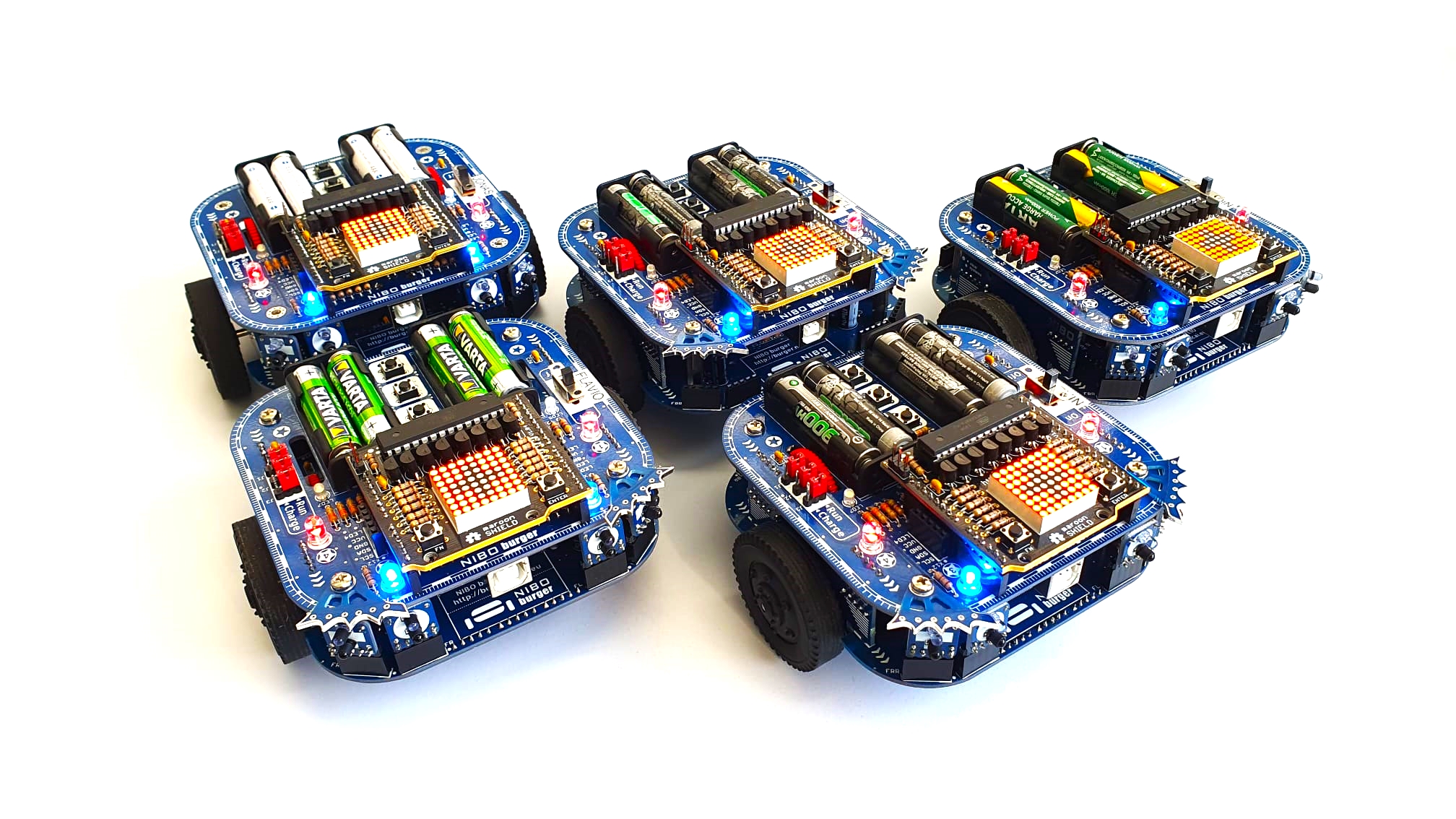
NIBO Burger represents the electronics project of the apprenticeship. It consists of a small robot which will be assembled, soldered and programmed in the standard language C by the apprentices.
The scope, including any and all datasheets and Wiki articles, are written in english. After the assembly and functionality test the apprentices will get an introduction in programming with C. The highlight of the project consists of the following «master tasks».
As a bonus excercise the robot will get visual upgrades made with 3D printed parts. See below a rear spoiler as an example.
A) Round trip
The robot has to drive exactly 1.5m forward, turn 180° and return to his home position. To make this excercise work, the odometry sensors of the wheels need to be read out and compared. Based on this the PID controlled motors turn accordingly.
Excercise round trip (Nibo01_V1.0.pdf)
B) Fraidy cat
The front of the robot has built-in IR bricks. These are infrared sensors which can detect obstacles. In this excercise, the robot has to avoid these obstacles.
Excercise fraidy cat (Nibo02_V1.0.pdf)
C) Follow me
Contrary to excercise B, in excercise C the robot doesn’t have to avoid obstacles but instead follow them. In this case the human hand.
Excercise follow me (Nibo03_V1.0.pdf)
D) Colour detection
With the RGB (red-green-blue) coloursensors the basic colours black, white, red, yellow, green and blue have to be detected and displayed on the built-in display. The display runs independently with a separate microcontroller. The microcontroller of the robot communicates with the microcontroller of the display by UART.
Excercise colour detection (Nibo04_V1.1.pdf)
E) Rabbit warren
In the supreme discipline the robot has to follow a black line on the ground. The line gets detected with sensors which in turn control the motors.
Excercise rabbit warren (Nibo05_V1.0.pdf)
Documentation
The elctrical parts, in combination with the soldered circuits and the program, get summraized in a written documentation by the apprentices. The following PDFs can be downloaded for a later reading.
| Name | Date | Profession | Documentation |
|---|---|---|---|
| Marvin Büeler | 2016-2020 | automation engineer | Download PDF |
| Joel Glaus | 2017-2021 | automation engineer | Download PDF |
| David Bernhard | 2018-2022 | automation engineer | Download PDF |
| Jonas Bisig | 2018-2022 | automation engineer | Download PDF |
| Stefan Feier | 2019-2023 | automation engineer | Download PDF |
| Nicolas Diethelm | 2020-2024 | automation engineer | Download PDF |
| Flavio Knobel | 2020-2024 | automation engineer | Download PDF |
| Kevin Kälin | 2021-2025 | automation engineer | |
| Linus Lacher | 2022-2026 | automation engineer |
The project description including the excercises and support are available in the following GitHub repository: https://github.com/pamasol/Lehrlingsprojekt-Nibo-Burger